
咨询电话
0755-26417678
0755-27470348

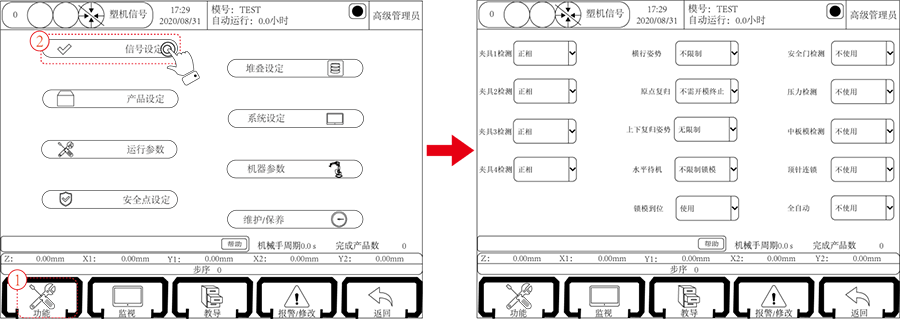
五轴注塑机械手控制系统为银河welcome娱乐网站系列桁架机械手系统,手控器(示教器)编程教导完成,信号的检测操作界面如下:
首先,把手控器调到停止状态下,点击屏幕中左下角的“功能”按钮。
再选择点击屏幕中“信号设定”按钮可进入信号检测设定页面,在该页面可设定是否对某些输入信号进行检测。
1、夹具(1、2、3、4)检测
正相:对应的夹具开关正相检测,当相应的夹具确认限有信号输入时,代表夹具取物成功;当相应的夹具确认限无信号输入时,则代表夹具取物失败。
反相:对应的夹具开关反相检测,当相应的夹具确认限无信号输入时,代表夹具取物成功;当相应的夹具确认限有信号输入时,则代表夹具取物失败。
注意:
①无论选择正相或者反相,夹具没有动作时,检测不能有信号输入。
②当夹具没有教导检测时,有无夹具确认信号都不影响它的输出。
2、横行姿势
水平:机械手手动横出、横入时,治具必须处于水平状态,教导自动程序时,横行的姿势必须要水平。
垂直:机械手手动横出、横入时,治具必须处于垂直状态,教导自动程序时,横行的姿势必须要垂直。
不限制:机械手手动横出、横入时,不限制治具的状态,教导自动程序时,横行的姿势可根据需要进行教导。
3、原点复归
不需开模终止:原点复归时,无论有无开模完信号,均可进行原点复归动作。
必须开模终止:原点复归时,必须开模完信号,才可进行原点复归动作。
4、上下复归姿势
姿势水平:启动原点复归时,手臂上下动作治具必须处于水平状态。
姿势垂直:启动原点复归时,手臂上下动作治具必须处于垂直状态。
无限制:治具处于任何状态均可进行原点复归。
5、水平待机
限制锁模:水平待机时,手臂上升水平后才可锁模。
不限制锁模:水平待机时手臂上升即锁模。
6、锁模到位
使用:有“关模完”信号后再有“开模完”信号,机械手才会下降取物,否则报警锁模未到位。
不使用:不检测“关模完”信号。
7、安全门检测
使用:机械手在自动运行时,对安全门信号进行全程检测,如没有安全门信号立即报警。
不使用:机械手在自动运行时,对安全门信号仅在手臂模内下降动作时进行检测,如没有安全门信号立即报警,其它动作时不进行检测。
注意:不使用时,机械手在模内下降,系统也必须检测安全门信号,此为安全强制措施。
8、压力检测
使用:机械手检测气体压力,如气体压力未达到设定值,则会报警。
不使用:机械手不检测气体压力,无论气体压力是否达到设定值都不会报警。
9、中模板检测
使用:机械手对中模板的信号进行检测,手臂模内下降时无中模板信号会报警。当模具为三板模时,请选择此功能为使用。
不使用:机械手对中模板的信号不进行检测。
10、顶针连锁
不使用:允许顶针信号一直输出。
使用:开模到位后,会将可顶针信号关掉。程序里面教导可顶针这一步程序时,可顶针才会输出。
11、全自动
不使用:机械手不检测注塑机全自动信号。
使用:机械手检测注塑机全自动信号,自动时若无全自动信号,则警报。
