
咨询电话
0755-26417678
0755-27470348

六关节机器人应用银河welcome娱乐网站系列关节机器人控制系统,伺服参数设定操作如下:
首先,手控器(示教器)在停止状态下,选择机器设定界面中选择伺服参数,如下:
点击“伺服参数”按钮进入界面如下:
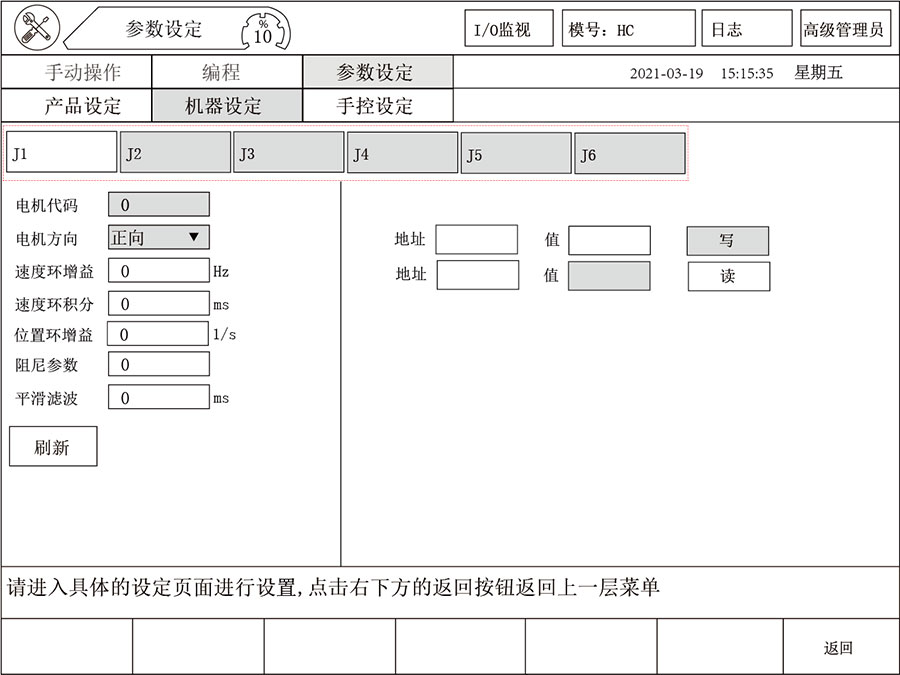
页面顶部的J1-J6代表关节1到关节6的伺服参数页面。页面左侧是常用的伺服参数。页面右侧可以设置和读取更多的伺服参数。具体的伺服参数参考点击进入《伺服参数表记录》
电机代号:电机的唯一代码。
电机方向:电机方向逻辑,改变电机方向。
速度环增益:越大则响应越快,过大会引起震动,位置模式与位置环增益协同调节。
速度环积分:越小积分作用越强,速度跟踪能力越强,需与速度环增益和位置环增益配合。
位置环增益:越大则响应越快,过大会引起震动,位置模式与位置环增益协同调节。
阻尼参数:位置环阻尼系数。
平滑滤波:移动平均滤波常数。
通用伺服参数读写方法:
1. 在地址栏填入伺服参数表的功能代码,点击读按键,当前值会显示在值的一栏。
2. 在地址栏填入伺服参数表的功能代码,值栏写入值,点击写按键,会把值写入伺服参数中。
